MODUL 4 (DEMO PROJECT)
SMART ROOM SYSTEM
1. Tujuan Perancangan [KEMBALI]
1.
Memenuhi syarat
untuk Modul 4 Praktikum Mikrokontroller & Mikroprosesor.
2.
Mempermudah
lansia atau orang-orang disabilitas khususnya kesulitan dalam berjalan.
3.
Mempermudah
pengguna untuk menghidupkan dan mematikan kipas saat kondisi
terpenuhi.
4.
Membuka dan
menutup gorden saat suatu kondisi terpenuhi.
2. Alat dan Bahan [Kembali]
a. Alat
·
Probes
1.
Jumper

Gambar 1. Jumper
2. Adaptor

Gambar 2. Adaptor
b. Bahan
1.
Resistor
Resistor atau hambatan
adalah salah satu komponen elektronika yang memiliki nilai hambatan tertentu,
dimana hambatan ini akan menghambat arus listrik yang mengalir
melaluinya.

Gambar 3. Resistor
Spesifikasi Resistor :

2.
Potensiometer
Potensiometer adalah
resistor tiga terminal dengan sambungan geser yang
membentuk pembagi tegangan dapat disetel. Jika hanya dua terminal yang
digunakan (salah satu terminal tetap dan terminal geser), potensiometer
berperan sebagai resistor variabel atau Rheostat. Potensiometer biasanya
digunakan untuk mengendalikan peranti elektronik seperti pengendali suara pada
penguat.




Spesifikasi :

3. Transistor




· Kalibrasi dalam satuan derajat celcius.
· Lineritas +10 mV/ º C.
· Akurasi 0,5 º C pada suhu ruang.
· Range +2 º C – 150 º C.
· Dioperasikan pada catu daya 4 V – 30 V.
· Arus yang mengalir kurang dari 60 μA.

1.
Sensor LDR

Umumnya Sensor LDR memiliki nilai hambatan 200 Kilo Ohm pada saat dalam kondisi sedikit cahaya (gelap), dan akan menurun menjadi 500 Ohm pada kondisi terkena banyak cahaya. Tak heran jika komponen elektronika peka cahaya ini banyak diimplementasikan sebagai sensor lampu penerang jalan, lampu kamar tidur, alarm dan lain-lain.
Adapun spesifikasi atau karakteristrik umum dari sensor cahaya LDR adalah sebagai berikut :
· Tegangan maksimum (DC): 150V
· Konsumsi arus maksimum: 100mW
· Tingkatan Resistansi/Tahanan : 10Ω sampai 100KΩ
· Puncak spektral: 540nm (ukuran gelombang cahaya)
· Waktu Respon Sensor : 20ms – 30ms
· Suhu operasi: -30° Celsius – 70° Celcius.



2.
Sensor Sentuh

Sensor
Sentuh adalah sensor elektronik yang dapat mendeteksi sentuhan. Sensor Sentuh
ini pada dasarnya beroperasi sebagai sakelar apabila disentuh, seperti sakelar
pada lampu, layar sentuh ponsel dan lain sebagainya. Sensor Sentuh ini dikenal
juga sebagai Sensor Taktil (Tactile Sensor).
Spesifikasi :
·
Tegangan
kerja : 2v s/d 5.5v (optimal 3V)
·
Output
high VOH : 0.8 VCC (typical)
·
Output
low VOL : 0.3 VCC (max)
·
Arus
Output Pin Sink (@ VCC 3V, VOL 0.6V) : 8 mA
·
Arus
Output pin pull-up (@ VCC=3V, VOH=2.4V) : 4 mA
·
Waktu
respon (low power mode): max 220 ms
·
Waktu
respon (touch mode): max 60 ms
·
Ukuran:
24 mm x 24 mm x 7.2 mm
Touch Sensor atau Sensor Sentuh adalah sensor
elektronik yang dapat mendeteksi sentuhan. Sensor Sentuh ini pada dasarnya
beroperasi sebagai sakelar apabila disentuh, seperti sakelar pada lampu, layar
sentuh ponsel dan lain sebagainya. Sensor Sentuh ini dikenal juga sebagai
Sensor Taktil (Tactile Sensor). Seiring dengan perkembangan teknologi, sensor
sentuh ini semakin banyak digunakan dan telah menggeser peranan sakelar mekanik
pada perangkat-perangkat elektronik.
Tabel
1. Sensor Sentuh

Grafik respon sensor
Sentuh:

3.
Sensor LM35
1. Resolusi Sensor 10 mVolt/ ºC, sehingga dapat dikalibrasi langsung dalam celcius.
2. Keakurasi kalibrasi 0,5 ºC pada suhu 25 ºC .
3. Jangkauan maksimal operasi suhu -55 ºC sampai +150 ºC.
4. Tegangan kerja 4v sampai 30 volt.
5. Konsumsi arus rendah kurang dari 60 µA.
6. Faktor pemanasan diri yang rendah (low-heating) kurang dari 0,1 ºC pada udara diam.
7. Impedansi keluaran yang rendah 0,1 W untuk beban 1 mA.
8. Toleransi ketidaklinieran hanya sekitar ± ¼ ºC

Tiga pin LM35 menujukan fungsi masing-masing pin diantaranya, pin 1 berfungsi sebagai sumber tegangan kerja dari LM35, pin 2 atau tengah digunakan sebagai tegangan keluaran atau Vout dengan jangkauan kerja dari 0 Volt sampai dengan 1,5 Volt dengan tegangan operasi sensor LM35 yang dapat digunakan antara 4 Volt sampai 30 Volt.

d. Komponen Output
1.
Motor DC

Gambar 18.
Motor DC
Motor Listrik DC atau DC Motor adalah
suatu perangkat yang mengubah energi listrik menjadi energi kinetik atau
gerakan (motion). Motor DC ini juga dapat disebut sebagai Motor
Arus Searah. Seperti namanya, DC Motor memiliki dua terminal dan memerlukan
tegangan arus searah atau DC (Direct Current)
untuk dapat menggerakannya
Motor Listrik DC atau DC Motor ini menghasilkan sejumlah
putaran per menit atau biasanya dikenal dengan istilah RPM (Revolutions per
minute) dan dapat dibuat berputar searah jarum jam maupun berlawanan arah jarum
jam apabila polaritas listrik yang diberikan pada Motor DC tersebut dibalikan.
Kebanyakan Motor Listrik DC memberikan kecepatan rotasi sekitar 3000 rpm hingga 8000 rpm dengan
tegangan operasional dari 1,5V hingga 24V. Apabila tegangan yang diberikan ke
Motor Listrik DC lebih rendah dari tegangan operasionalnya maka akan dapat memperlambat
rotasi motor DC tersebut sedangkan tegangan yang lebih tinggi dari tegangan
operasional akan membuat rotasi motor DC menjadi lebih cepat. Namun ketika
tegangan yang diberikan ke Motor DC tersebut turun menjadi dibawah 50% dari
tegangan operasional yang ditentukan maka Motor DC tersebut tidak dapat
berputar atau terhenti. Sebaliknya, jika tegangan yang diberikan ke Motor DC
tersebut lebih tinggi sekitar 30% dari tegangan operasional yang ditentukan,
maka motor DC tersebut akan menjadi sangat panas dan akhirnya akan menjadi
rusak.
Spesifikasi:


2.
Motor Servo
Motor
servo adalah motor yang mampu bekerja dua arah (CW dan CCW) dimana arah dan sudut
pergerakan rotornya dapat dikendalikan dengan memberikan variasi lebar pulsa
(duty cycle) sinyal PWM pada bagian pin kontrolnya.

Gambar 21. Motor Servo
Spesifikasinya kurang lebih sebagai berikut :
·
tegangan kerja : 4,8 – 6
Vdc
·
torsi : 1,6 kg/cm
·
arus : < 500 mA
·
dimensi : 22 x 12,5 x
29,5 cm
·
berat : 9 gr
·
kecepatan putaran: 0,12
detik/60 derajat
Konfigurasi Pin :
 |
Motor Servo

3. LCD
LCD atau Liquid Crystal Display adalah suatu
jenis media display (tampilan) yang menggunakan kristal cair (liquid crystal)
untuk menghasilkan gambar yang terlihat. Teknologi Liquid Crystal Display (LCD)
atau Penampil Kristal Cair sudah banyak digunakan pada produk-produk seperti
layar Laptop, layar Ponsel, layar Kalkulator, layar Jam Digital, layar
Multimeter, Monitor Komputer, Televisi, layar Game portabel, layar Thermometer
Digital dan produk-produk elektronik lainnya.
Spesifikasi dari LCD 16×2
Adapun fitur – fitur yang tersedia antara lain
- Terdiri dari 16 kolom dan 2 baris
- Dilengkapi dengan back light
- Mempunyai 192 karakter tersimpan
- Dapat dialamati dengan mode 4-bit dan 8-bit
- Terdapat karakter generator terprogram
Pin – pin LCD 16×2 dan keterangannya

Keterangan :
- GND : catu daya 0Vdc
- VCC : catu daya positif
- Constrate : untuk kontras tulisan pada LCD
- RS atau Register Select :
- High : untuk mengirim data
- Low : untuk mengirim instruksi
- R/W atau Read/Write
- High : mengirim data
- Low : mengirim instruksi
- Disambungkan dengan LOW untuk pengiriman data ke layar
- E (enable) : untuk mengontrol ke LCD ketika bernilai LOW, LCD tidak dapat diakses
- D0 – D7 = Data Bus 0 – 7
- Backlight + : disambungkan ke VCC untuk menyalakan lampu latar
- Backlight – : disambungkan ke GND untuk menyalakan lampu lata
Fitur LCD 16x2
Fitur-fitur LCD ini
terutama meliputi yang berikut.
·
Tegangan operasi LCD ini adalah 4.7V-5.3V
·
Ini termasuk dua baris di mana setiap baris dapat
menghasilkan 16 karakter.
·
Pemanfaatan arus adalah 1mA tanpa backlight
·
Setiap karakter dapat dibangun dengan kotak 5 × 8 piksel
·
Huruf & angka LCD alfanumerik
·
Tampilan ini dapat bekerja pada dua mode seperti 4-bit &
8-bit
·
Ini dapat diperoleh dalam Backlight Biru & Hijau
·
Ini menampilkan beberapa karakter yang dibuat khusus
4. Buzzer

Konfigurasi Pin:

Spesifikasi:
1. Tegangan operasi 4-8V DC
2. Arus <30mA
3. Frekuensi Resonansi 2300Hz
e. Komponen Lainnya
1.
Arduino Uno

Tabel 2.
Spesifikasi Arduino Uno
|
SPESIFIKASI |
|
|
Arduino
Uno |
|
|
Microcontroller |
ATmega328P |
|
Operating
Voltage |
5V |
|
Input
Voltage (recommended) |
7-12V |
|
Input
Voltage (limit) |
6-20V |
|
Digital
I/O Pins |
14
(of which 6 provide PWM output) |
|
PWM
Digital I/O Pins |
6 |
|
Analog
Input Pins |
6 |
|
DC
Current per I/O Pin |
20 mA |
|
DC
Current for 3.3V Pin |
50 mA |
|
Flash
Memory 32 KB |
(ATmega328P) |
|
SRAM |
2 KB
(ATmega328P) |
|
EEPROM |
1 KB
(ATmega328P) |
|
Clock
Speed |
16
MHz |
|
LED_BUILTIN |
13 |
|
Length |
68.6
mm |
|
Width |
53.4
mm |
|
Weight |
|
Arduino Uno dapat diaktifkan melalui koneksi USB atau dengan
catu daya eksternal (otomatis). Daya Eksternal (non-USB) dapat berasal baik
dari AC-ke adaptor-DC atau baterai. Adaptor ini dapat dihubungkan dengan
menancapkan plug jack pusat-positif ukuran 2.1mm konektor POWER. Ujung kepala
dari baterai dapat dimasukkan kedalam Gnd dan Vin pin header dari konektor
POWER. Kisaran kebutuhan daya yang disarankan untuk board Uno adalah7 sampai
dengan 12 V, jika diberi daya kurang dari 7 V kemungkinan pin 5 V Uno dapat
beroperasi tetapi tidak stabil kemudian jika diberi daya lebih dari 12V,
regulator tegangan bisa panas dan dapat merusak board Uno.
Pin
listrik adalah sebagai berikut:
a)
VIN. Tegangan masukan
kepada board Arduino ketika itu menggunakan sumber daya eksternal (sebagai
pengganti dari 5volt koneksi USB atau sumber daya lainnya).
b)
5V. Catu daya digunakan
untuk daya mikrokontroler dan komponen lainnya.
c)
3v3. Sebuah pasokan
3,3volt dihasilkan oleh regulator on-board.
d)
GND. Ground pin.Input dan
Output
Masing-masing dari 14 pin digital di Uno dapat digunakan
sebagai input atau output, dengan menggunakan fungsi pinMode (), digitalWrite
(), dan digitalRead (), beroperasi dengan daya 5 volt. Setiap
pin dapat memberikan atau menerima maksimum 40 mA dan memiliki internal pull-up
resistor (secara default terputus) dari 20-50 kOhms. Selain itu, beberapa pin
memiliki fungsi khusus:
e)
Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan
mengirimkan (TX) TTL data serial. Pin ini dihubungkan ke pin yang berkaitan
dengan chip Serial ATmega8U2 USB-to-TTL.
f)
Eksternal menyela: 2 dan 3. Pin ini dapat dikonfigurasi untuk memicu
interrupt pada nilai yang rendah, dengan batasan tepi naik atau turun, atau
perubahan nilai. Lihat (attachInterrupt) fungsi untuk rincian lebih lanjut.
g)
PWM: 3, 5, 6, 9, 10, dan 11. Menyediakan output PWM 8-bit
dengan fungsi analogWrite ().
h)
SPI: 10 (SS), 11 (Mosi), 12 (MISO), 13 (SCK). Pin ini mendukung
komunikasi SPI menggunakan SPI library.
i)
LED: 13. Ada built-in LED terhubung ke pin digital 13. Ketika
pin bernilai nilai HIGH, LED on, ketika pin bernilai LOW, LED off.
Arduino Uno memiliki 6 masukan analog, berlabel A0 sampai
dengan A5, yang masing-masing menyediakan 10 bit dengan resolusi (yaitu 1024
nilai yang berbeda). Selain itu, beberapa pin memiliki fungsi khusus:
j)
I2C: A4 (SDA) dan A5
(SCL). Dukungan I2C (TWI) komunikasi
menggunakan perpustakaan Wire.
k)
Aref. Tegangan referensi (0 sampai 5V saja) untuk input analog.
Digunakan dengan fungsi analogReference ().
l)
Reset. Bawa baris ini LOW untuk me-reset mikrokontroler.
2.
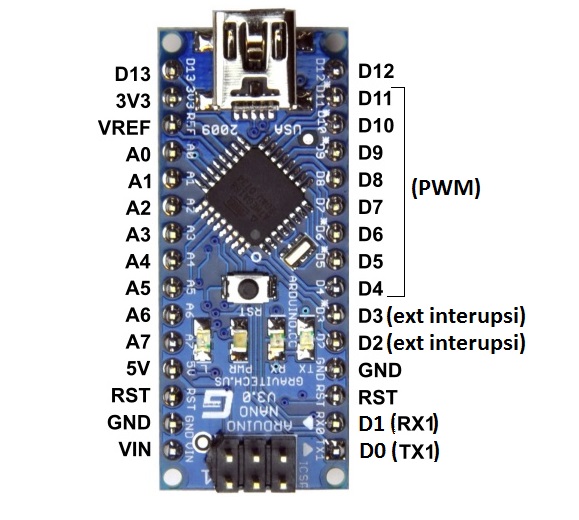
Arduino Nano

Konfigurasi pin Arduino
Nano. Arduino Nano memiliki 30 Pin. Berikut Konfigurasi pin Arduino Nano.
1.
VCC merupakan pin yang berfungsi sebagai pin masukan catu
daya digital.
2.
GND merupakan pin ground untuk catu daya digital.
3.
AREF merupakan Referensi tegangan untuk input analog.
Digunakan dengan fungsi analogReference().
4.
RESET merupakan Jalur LOW ini digunakan untuk me-reset
(menghidupkan ulang) mikrokontroler. Biasanya digunakan untuk menambahkan
tombol reset pada shield yang menghalangi papan utama Arduino
5.
Serial RX (0) merupakan pin sebagai penerima TTL data
serial.
6.
Serial TX (1) merupakan pin sebagai pengirim TT data serial.
7.
External Interrupt (Interupsi Eksternal) merupakan pin yang
dapat dikonfigurasi untuk memicu sebuah interupsi pada nilai yang rendah,
meningkat atau menurun, atau perubahan nilai.
8.
Output PWM 8 Bit merupakan pin yang berfungsi untuk
dataanalogWrite().
9.
SPI merupakan pin yang berfungsi sebagai pendukung
komunikasi.
10.
LED merupakan pin yang berfungsi sebagai pin yag diset
bernilai HIGH, maka LED akan menyala, ketika pin diset bernilai LOW maka LED
padam. LED Tersedia secara built-in pada papan Arduino Nano.
11.
Input Analog (A0-A7) merupakan pin yang berfungsi sebagi pin
yang dapat diukur/diatur dari mulai Ground sampai dengan 5 Volt, juga
memungkinkan untuk mengubah titik jangkauan tertinggi atau terendah mereka
menggunakan fungsi analogReference().
Adapun spesifikasi yang
dimiliki oleh Arduino Nano:
1.
Chip Mikrokontroller menggunakan ATmega328p atau Atmega168.
2.
Tegangan operasi sebesar 5volt.
3.
Tegangan input (yang disarankan) sebesar 7volt – 12 volt.
4.
Terdapat pin digital I/O 14 buah dan 6 diantaranya sebagai
output PWM.
5.
8 Pin Input Analog.
6.
40 Ma Arus DC per pin I/O
7.
Flash Memory16KB (Atmega168) atau 32KB (Atmega328) 2KB
digunakan oleh Bootloader.
8.
1 KbyteSRAM (Atmega168) atau 2 Kbyte 32KB (Atmega328).
9.
512 Byte EEPROM (Atmega168) atau 1 Kbyte (Atmega328).
10.
16MHz Clock Speed.
11.
Ukuran 1.85cm x 4.3cm.
3.
Driver Motor (L298N)
Modul Driver Motor L298N ini adalah sebuah sebuah H-Bridge Dual Motor Controller 2A yang memungkinkan kita untuk mengatur arah putaran maupun kecepatan dari satu atau dua motor DC. Selain itu, dengan modul driver motor ini kita juga dapat mengontrol sebuah motor stepper bipolar dengan mudah.
Fitur
Module Driver Motor L298N
·
Tegangan operasi 0-46v
·
tegangan logic 4,5-7v
·
Arus 4A
·
heatsink untuk membuang panas
·
Regulator 7805 dengan keluaran 5v
·
Dioda proteksi
·
mampu mengontrol 2 motor DC
Modul driver motor ini dapat digunakan untuk motor dengan rentang tegangan DC antara 5 Volt - 35 Volt. Pada modul ini terdapat regulator 5V sehingga jika membutuhkan sumber tegangan 5V kita bisa mendapatkannya dari board ini. Berikut ini adalah spesifikasi dari Modul Driver Motor L298N:
1. Double H-Bridge drive chip L298N
2. Logical voltage 5V
3. Logical Current antara 0-36 mA
4. Drive voltage antara 5V sampai dengan 35V
5. Drive current sebesar 2A untuk setiap motor DC
6. Ukuran sebesar 43x43x27 mm
7. Berat 30 gram
Berikut ini adalah bentuk fisik dari Modul Driver Motor L298N :



1. Arduino Uno
Arduino Uno adalah
board mikrokontroler berbasis ATmega328 (datasheet). Memiliki 14 pin input dari
output digital dimana 6 pin input tersebut dapat digunakan sebagai output
PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power,
ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan,
cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan
kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk
menjalankannya. Uno berbeda dengan semua board sebelumnya dalam hal koneksi
USB-to-serial yaitu menggunakan fitur Atmega8U2 yang diprogram sebagai
konverter USB-to-serial berbeda dengan board sebelumnya yang menggunakan chip
FTDI driver USB-to-serial.
Nama “Uno” berarti satu dalam
bahasa Italia, untuk menandai peluncuran Arduino 1.0. Uno dan versi 1.0 akan
menjadi versi referensi dari Arduino. Uno adalah yang terbaru dalam serangkaian
board USB Arduino, dan sebagai model referensi untuk platform Arduino,
untuk perbandingan dengan versi sebelumnya, lihat indeks board
Arduino.
Spesifikasi Board Arduino Uno:
| Tegangan Operasi | 5V |
| Tegangan Input | (disarankan) 7—12V |
| Batas Tegangan Input | 6—2OV |
| Pin Digital I/O | 14 (di mana 6 pin output PWM) |
| Pin Analog Input | 6 |
| Arus DC per I/O Pin | 40 mA |
| Arus DC untuk pin | 3.3V 50 mA |
| Flash Memory | 32 KB (ATmega328) , di mana 0,5 KB digunakan olehbootloader |
| SRAM | 2 KB (Atmega328) |
| EEPROM | 1 KB (Atmega328) |
| Clock | 16 MHz |
Arduino Uno dapat
diaktifkan melalui koneksi USB atau dengan catu daya eksternal (otomatis). Daya
Eksternal (non-USB) dapat berasal baik dari AC-ke adaptor-DC atau baterai.
Adaptor ini dapat dihubungkan dengan menancapkan plug jack pusat-positif ukuran
2.1mm konektor POWER. Ujung kepala dari baterai dapat dimasukkan kedalam Gnd
dan Vin pin header dari konektor POWER. Kisaran kebutuhan daya yang disarankan
untuk board Uno adalah7 sampai dengan 12 V, jika diberi daya kurang dari 7 V
kemungkinan pin 5 V Uno dapat beroperasi tetapi tidak stabil kemudian jika
diberi daya lebih dari 12V, regulator tegangan bisa panas dan dapat merusak
board Uno.
Pin listrik adalah sebagai berikut:
a) VIN. Tegangan masukan
kepada board Arduino
ketika itu menggunakan sumber daya eksternal (sebagai pengganti dari 5volt
koneksi USB atau sumber daya lainnya).
b) 5V. Catu daya
digunakan untuk daya
mikrokontroler dan komponen lainnya.
c) 3v3. Sebuah pasokan
3,3volt dihasilkan oleh
regulator on-board.
d) GND. Ground pin.Input
dan Output
Masing-masing dari 14
pin digital di Uno dapat digunakan sebagai input atau output, dengan
menggunakan fungsi pinMode (), digitalWrite (),
dan digitalRead (), beroperasi dengan daya 5 volt. Setiap pin dapat
memberikan atau menerima maksimum 40 mA dan memiliki internal pull-up resistor
(secara default terputus) dari 20-50 kOhms. Selain itu, beberapa pin memiliki
fungsi khusus:
e) Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan
mengirimkan
(TX) TTL data serial. Pin ini dihubungkan ke pin yang berkaitan dengan chip Serial
ATmega8U2 USB-to-TTL.
f) Eksternal menyela: 2 dan 3. Pin ini dapat dikonfigurasi untuk
memicu interrupt pada nilai yang rendah, dengan batasan tepi naik atau turun,
atau perubahan nilai. Lihat (attachInterrupt) fungsi untuk rincian lebih
lanjut.
g) PWM: 3, 5, 6, 9, 10, dan 11. Menyediakan output PWM 8-bit
dengan
fungsi analogWrite ().
h) SPI: 10 (SS), 11 (Mosi), 12 (MISO), 13 (SCK). Pin ini
mendukung
komunikasi SPI menggunakan SPI library.
i) LED: 13. Ada built-in LED terhubung ke pin digital 13. Ketika
pin
bernilai nilai HIGH, LED on, ketika pin bernilai LOW, LED off.
Arduino Uno memiliki 6
masukan analog, berlabel A0 sampai dengan A5, yang masing-masing menyediakan 10
bit dengan resolusi (yaitu 1024 nilai yang berbeda). Selain itu, beberapa pin
memiliki fungsi khusus:
j) I2C:
A4 (SDA) dan A5 (SCL). Dukungan I2C (TWI) komunikasi
menggunakan
perpustakaan Wire.
k) Aref. Tegangan referensi (0 sampai 5V saja) untuk input analog.
Digunakan dengan fungsi analogReference ().
l) Reset. Bawa baris ini LOW untuk me-reset
mikrokontroler.
Arduino Uno memiliki
sejumlah fasilitas untuk berkomunikasi dengan komputer, Arduino lain, atau
mikrokontroler lainnya. Atmega328 menyediakan UART TTL (5V) untuk komunikasi
serial, yang tersedia di pin digital 0 (RX) dan 1 (TX). Sebuah Atmega8U2 sebagai
saluran komunikasi serial melalui USB dan sebagai port virtual com untuk
perangkat lunak pada komputer. Firmware ’8 U2 menggunakan driver USB standar
COM, dan tidak ada driver eksternal yang diperlukan. Namun, pada Windows
diperlukan, sebuah file inf.
Perangkat lunak Arduino terdapat monitor serial yang memungkinkan digunakan memonitor data tekstual sederhana yang akan dikirim komputer dari board Arduino. LED RX dan TX di papan tulis akan berkedip ketika data sedang dikirim melalui chip USB-to-serial dengan koneksi USB ke komputer (tetapi tidak untuk komunikasi serial pada pin 0 dan 1). Sebuah SoftwareSerial library memungkinkan untuk berkomunikasi secara serial pada salah satu pin digital pada board Uno. Atmega328 juga mendukung I2C (TWI) dan komunikasi SPI. Perangkat lunak Arduino termasuk perpustakaan Kawat untuk menyederhanakan penggunaan bus I2C, lihat dokumentasi untuk rincian. Untuk komunikasi SPI, menggunakan perpustakaan SPI
2. Arduino
Nano
Arduino Nano adalah
salah satu board mikrokontroler yang berukuran kecil, lengkap dan mendukung
penggunaan breadboard. Arduino Nano diciptakan dengan basis microcontroler
ATmega328 (untuk Arduino Nano versi 3.x) atau Atmega 16(untuk Arduino versi
2.x). Arduino Nano kurang lebih memiliki fungsi yang sama dengan Arduino
Duemilanove, tetapi dalam paket yang berbeda. ArduinoNano tidak menyertakan
colokan DC berjenis Barrel Jack, dan dihubungkan ke komputer menggunakan port
USB Mini-B. Arduino Nano dirancang dan diproduksi oleh perusahaan
Gravitecth.

Konfigurasi
pin Arduino Nano. Arduino Nano memiliki 30 Pin. Berikut Konfigurasi pin Arduino
Nano.
1.
VCC
merupakan pin yang berfungsi sebagai pin masukan catu daya digital.
2.
GND
merupakan pin ground untuk catu daya digital.
3.
AREF
merupakan Referensi tegangan untuk input analog. Digunakan dengan fungsi
analogReference().
4.
RESET
merupakan Jalur LOW ini digunakan untuk me-reset (menghidupkan ulang)
mikrokontroler. Biasanya digunakan untuk menambahkan tombol reset pada shield
yang menghalangi papan utama Arduino
5.
Serial
RX (0) merupakan pin sebagai penerima TTL data serial.
6.
Serial
TX (1) merupakan pin sebagai pengirim TT data serial.
7.
External
Interrupt (Interupsi Eksternal) merupakan pin yang dapat dikonfigurasi untuk
memicu sebuah interupsi pada nilai yang rendah, meningkat atau menurun, atau
perubahan nilai.
8.
Output
PWM 8 Bit merupakan pin yang berfungsi untuk dataanalogWrite().
9.
SPI
merupakan pin yang berfungsi sebagai pendukung komunikasi.
10.
LED
merupakan pin yang berfungsi sebagai pin yag diset bernilai HIGH, maka LED akan
menyala, ketika pin diset bernilai LOW maka LED padam. LED Tersedia secara
built-in pada papan Arduino Nano.
11.
Input
Analog (A0-A7) merupakan pin yang berfungsi sebagi pin yang dapat diukur/diatur
dari mulai Ground sampai dengan 5 Volt, juga memungkinkan untuk mengubah titik
jangkauan tertinggi atau terendah mereka menggunakan fungsi
analogReference().

Tabel 2. Konfigurasi Pin Arduino
Nano
Adapun
spesifikasi yang dimiliki oleh Arduino Nano:
1.
Chip
Mikrokontroller menggunakan ATmega328p atau Atmega168.
2.
Tegangan
operasi sebesar 5volt.
3. Tegangan
input (yang disarankan) sebesar 7volt – 12 volt.
4.
Terdapat
pin digital I/O 14 buah dan 6 diantaranya sebagai output PWM.
5.
8
Pin Input Analog.
6. 40
Ma Arus DC per pin I/O
7. Flash
Memory16KB (Atmega168) atau 32KB (Atmega328) 2KB digunakan oleh Bootloader.
8.
1
KbyteSRAM (Atmega168) atau 2 Kbyte 32KB (Atmega328).
9.
512
Byte EEPROM (Atmega168) atau 1 Kbyte (Atmega328).
10. 16MHz Clock Speed.
11. Ukuran 1.85cm x 4.3cm.
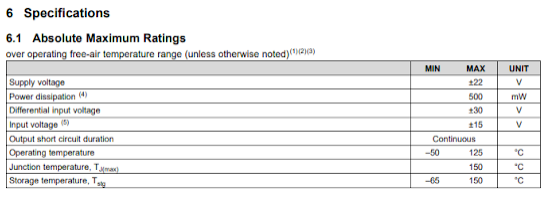
3. SensorLM35
Kelebihan dan kekurangan sensor suhu lm35 :
a. Rentang suhu yang jauh, antara -55 sampai +150 oC
b. Low self-heating, sebesar 0.08 oC
c. Beroperasi pada tegangan 4 sampai 30 V
d. Rangkaian tidak rumit
e. Tidak memerlukan pengkondisian sinyal
Membutuhkan sumber tegangan untuk beroperasi
Gambar 1. Sensor Suhu LM35

4. LDR
Sensor

Light Dependent Resistor
atau disingkat dengan LDR adalah jenis Resistor yang nilai hambatan atau nilai
resistansinya tergantung pada intensitas cahaya yang diterimanya. Nilai
Hambatan LDR akan menurun pada saat cahaya terang dan nilai Hambatannya akan
menjadi tinggi jika dalam kondisi gelap. Dengan kata lain, fungsi LDR (Light
Dependent Resistor) adalah untuk menghantarkan arus listrik jika menerima
sejumlah intensitas cahaya (Kondisi Terang) dan menghambat arus listrik dalam
kondisi gelap.
Naik turunnya
nilai
Hambatan akan sebanding dengan jumlah cahaya yang diterimanya. Pada umumnya,
Nilai Hambatan LDR akan mencapai 200 Kilo Ohm (kΩ) pada kondisi gelap dan
menurun menjadi 500 Ohm (Ω) pada Kondisi Cahaya Terang.
LDR (Light Dependent
Resistor) yang merupakan Komponen Elektronika peka cahaya ini sering digunakan
atau diaplikasikan dalam Rangkaian Elektronika sebagai sensor pada Lampu
Penerang Jalan, Lampu Kamar Tidur, Rangkaian Anti Maling, Shutter Kamera, Alarm
dan lain sebagainya.
Secara umum, cara kerja sensor LDR tidak jauh berbeda dengan jenis resistor lainnya, yaitu:
- Cara kerja sensor LDR ditentukan berdasarkan intensitas cahaya yang diterimanya. Karena aliran listrik dalam komponen ditentukan oleh sedikit dan banyaknya jumlah cahaya yang diterima oleh sensor.
- Apabila cahaya jatuh pada bahan semikonduktor yang membentuk komponen. Maka cahaya akan diserap oleh bahan semikonduktor tersebut, lalu sebagian energinya akan ditransfer pada elektron. Sehingga nilai resistensi pada sensor akan menurun.
- Sebaliknya, apabila intensitas cahaya yang mengenai sensor berkurang. Maka secara otomatis nilai resistansinya akan naik. Hal ini karena semakin sedikit nilai elektron yang dilepaskan untuk menghantarkan aliran arus listrik. Maka semakin naik juga nilai resistensi yang dihasilkannya.
Karakteristik dalam hal ini adalah spesifikasi sensor LDR.
- Sensor LDR memiliki tegangan DC maksimum hingga mencapai 150 volt.
- Alat tersebut memiliki konsumsi arus maksimum hingga 100 mW.
- Waktu respon untuk sensor LDR yaitu diprediksi dari 20 ms sampai dengan 30 ms.
- Sensor LDR memiliki tingkat resistensi mulai dari 10 Ohm sampai dengan 100 k Ohm.
- Untuk dapat beroperasi, sensor LDR dapat digunakan pada ruangan atau tempat dengan suhu -30 derajat sampai dengan 70 derajat Celcius.
Adapun grafik respon sensor adalah:

Sebutan lain untuk LDR (Light Dependent Resistor) adalah Photo Resistor, Photo Conduction ataupun Photocell.
5. Sensor Sentuh
Sensor Sentuh adalah sensor elektronik yang dapat mendeteksi sentuhan. Sensor Sentuh ini pada dasarnya beroperasi sebagai sakelar apabila disentuh, seperti sakelar pada lampu, layar sentuh ponsel dan lain sebagainya. Sensor Sentuh ini dikenal juga sebagai Sensor Taktil (Tactile Sensor).
Spesifikasi :
· Tegangan kerja : 2v s/d 5.5v (optimal 3V)
· Output high VOH : 0.8 VCC (typical)
· Output low VOL : 0.3 VCC (max)
· Arus Output Pin Sink (@ VCC 3V, VOL 0.6V) : 8 mA
· Arus Output pin pull-up (@ VCC=3V, VOH=2.4V) : 4 mA
· Waktu respon (low power mode): max 220 ms
· Waktu respon (touch mode): max 60 ms
· Ukuran: 24 mm x 24 mm x 7.2 mm
Touch Sensor atau Sensor Sentuh adalah sensor elektronik yang dapat mendeteksi sentuhan. Sensor Sentuh ini pada dasarnya beroperasi sebagai sakelar apabila disentuh, seperti sakelar pada lampu, layar sentuh ponsel dan lain sebagainya. Sensor Sentuh ini dikenal juga sebagai Sensor Taktil (Tactile Sensor). Seiring dengan perkembangan teknologi, sensor sentuh ini semakin banyak digunakan dan telah menggeser peranan sakelar mekanik pada perangkat-perangkat elektronik.
Berdasarkan fungsinya, Sensor Sentuh dapat dibedakan menjadi dua jenis utama yaitu Sensor Kapasitif dan Sensor Resistif. Sensor Kapasitif atau Capacitive Sensor bekerja dengan mengukur kapasitansi sedangkan sensor Resistif bekerja dengan mengukur tekanan yang diberikan pada permukaannya.

-.Sensor Kapasitif
Berbeda dengan Sensor Resistif yang menggunakan tekanan tertentu untuk merasakan perubahan pada permukaan layar, Sensor Kapasitif memanfaatkan sifat konduktif alami pada tubuh manusia untuk mendeteksi perubahan layar sentuhnya. Layar sentuh sensor kapasitif ini terbuat dari bahan konduktif (biasanya Indium Tin Oxide atau disingkat dengan ITO) yang dilapisi oleh kaca tipis dan hanya bisa disentuh oleh jari manusia atau stylus khusus ataupun sarung khusus yang memiliki sifat konduktif.
Pada saat jari menyentuh layar, akan terjadi perubahaan medan listrik pada layar sentuh tersebut dan kemudian di respon oleh processor untuk membaca pergerakan jari tangan tersebut. Jadi perlu diperhatikan bahwa sentuhan kita tidak akan di respon oleh layar sensor kapasitif ini apabila kita menggunakan bahan-bahan non-konduktif sebagai perantara jari tangan dan layar sentuh tersebut.
-.Sensor Resistif
Tidak seperti sensor sentuh kapasitif, sensor sentuh resistif ini tidak tergantung pada sifat listrik yang terjadi pada konduktivitas pelat logam. Sensor Resistif bekerja dengan mengukur tekanan yang diberikan pada permukaannya. Karena tidak perlu mengukur perbedaan kapasitansi, sensor sentuh resistif ini dapat beroperasi pada bahan non-konduktif seperti pena, stylus atau jari di dalam sarung tangan.
Sensor sentuh resistif terdiri dari dua lapisan konduktif yang dipisahkan oleh jarak atau celah yang sangat kecil. Dua lapisan konduktif (lapisan atas dan lapisan bawah) ini pada dasarnya terbuat dari sebuah film. Film-film umumnya dilapisi oleh Indium Tin Oxide yang merupakan konduktor listrik yang baik dan juga transparan (bening).
Cara kerjanya hampir sama dengan sebuah sakelar, pada saat film lapisan atas mendapatkan tekanan tertentu baik dengan jari maupun stylus, maka film lapisan atas akan bersentuhan dengan film lapisan bawah sehingga menimbulkan aliran listrik pada titik koordinat tertentu layar tersebut dan memberikan signal ke prosesor untuk melakukan proses selanjutnya.

6. Driver Motor (L293D)

Driver Motor adalah salah satu part mesin produksi sebagai motor penggerak
yang berfungsi untuk menggerakkan sebuah benda kerja baik secara langsung ke beban kerja
atau melalui perantara beban kerja.
Adapun contoh fungsi dari
aplikasi motor drive di beberapa benda kerja adalah sebagai berikut:
- Sebagai penggerak utama gear box.
- Sebagai penggerak utama roll line unit.
- Sebagai penggerak utama roll calender unit.
- Sebagai Penggerak utama pengaduk.
- Sebagai penggerak utama chain atau rantai.
- Sebagai penggerrak utama V Belt drive.
- Sebagai penggerak cyclo drive.
- Dan lain - lain.
Bagian - bagian part dari motor drive adalah sebagai berikut:
- Casing Motor drive, yang berfungsi sebagai rumah kumparan rotor dan stator sekaligus melindungi kumparan unit dari kebocoran barang asing masuk ke area kumparan seperti air.
- Cover Bearing depan dan belakang, yang berfungsi sebagai penutup ruang casing motor bagian depan dan belakang, sekaligus sebagai dudukan bearing shaft rotor.
- Ball Bearing, yang berfungsi sebagai tumpuan pokok dari shaft rotor sekaligus sebagai bagian yang berputar untuk memperingan beban putar dari shaft rotor.
- Terminal kabel joint, Yang berfungsi untuk joint kabel antara motor dengan power supply utama.
- Baut dan nut pengikat, yang berfungsi sebagai pengikat antara cover bearing depan dan belakang dengan casing motor sehingga motor unit terikat kencang menjadi unit.
- Shaft Rotor, yang berfungsi sebagai shaft bagian yang berputar setelah mendapat arus listrik dari kumparan stator.
- Kumparan Stator, yang berfungsi sebagai pembangkit arus untuk di salurkan ke shaft rotor.
- Kipas baling-baling, yang berfungsi sebagai pendingin atau pembuang panas yang timbul akibat proses kerja antara stator dengan rotor.
Menurut Datasheet IC L293D adalah suatu bentuk rangkaian Daya tinggi terintegrasi
yang mempu melayani empat buah beban dengan arus antara 600mA sampai dengan 1.2A.
Keempat pin Inputnya di desain untuk dapat menerima masukan level logika TTL. IC L293D
dapat dipakai sebagai Driver Relay, Motor DC, motor Stepper maupun sebagai pengganti saklar
dengan kecepatan switching mencapai 5KHz.
Pada dasarnya, L293D merupakan dua
buah rangkaian jembatan-H yang dikemas dalam paket Integrated Circuit. Kedua rangkaian H
bridge ini dikontrol oleh sebuah pin bernama Enable.
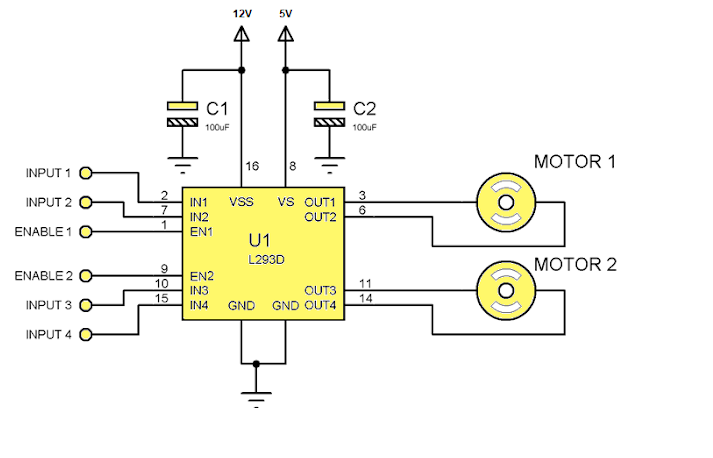
Gambar 21.Struktur L293D
Cara kerja rangkaian Driver motor menggunakan IC ini adalah:
- IC akan merespon sinyal input 1 dan input 2 ketika pin Enable 1 diberi logika HIGH. Jika diberi logika Low maka Motor 1 tidak akan berputar.
- Ketika Input 1 dan input 2 diberikan input logika yang berbeda (Low dan high atau sebaliknya) maka motor akan berputar.
- Ketika Ketika Input 1 dan input 2 diberikan logika yang berlawanan maka motor akan berputar berlawanan arah dari sebelumnya.
- IC akan merespon sinyal input 3 dan input 4 ketika pin Enable 2 diberi logika HIGH. Jika diberi logika Low maka Motor 2 tidak akan berputar.
- Ketika Input 3 dan input 4 diberikan input logika yang berbeda (Low dan high atau sebaliknya) maka motor akan berputar.
- Ketika Ketika Input 3 dan input 4 diberikan logika yang berlawanan maka motor akan berputar berlawanan arah dari sebelumnya.
- Syarat motor motor berputar adalah logika input berlawanan. Jika logika input sama-sama High atau sama-sama Low maka Motor tidak akan berputar.
- Putaran motor searah jarum jam disebut Clock Wise (CW), sedangkan putaran motor yang berlawanan arah jarum jam disebut Counter Clock Wise (CCW).
7. Motor
Gambar 22. Motor
Motor listrik adalah mesin yang mengubah energi listrik menjadi energi mekanik atau tenaga penggerak atau tenaga pemutar. Dalam peralatan rumah tangga motor listrik dapat ditemukan contohnya: pengering rambut kipas angin, mesin cuci, mesin jahit, pompa air, blender, mixer, bor listrik, lemari es, dan penyedot debu. Sedangkan dalam industri motor listrik digunakan untuk impeller pompa, fan, blower, menggerakan kompresor, mengangkat beban dan lain-lain.
John Ambrose Fleming diakhir abad 19, memperkenalkan sebuah cara untuk memudahkan memahami cara kerja motor listrik. Yang disebut kaidah tangan kiri, kaidah ini memudahkan untuk mengetahui arah gaya dorong/lorentz, arah medan magnet dan arah arus listrik pada sebuah sistem induksi elektromagnetik. Berikut gambar kaidah tangan kiri.

Gambar 23.Aturan Tangan Kiri
Prinsi
p kerja motor listrik adalah mengubah tenaga listrik menjadi tenaga mekanik. Perubahan
dilakukan dengan merubah tenaga listrik menjadi magnet yang disebut elektromagnit. Menurut
sifatnya, kutub-kutub magnit senama akan tolak-menolak dan kutub-kutub tidak senama akan
tarik-menarik. Sehingga jika sebuah magnet ditempatkan pada sebuah poros yang berputar dan
magnet lainnya pada suatu kedudukan yang tetap maka akan diperoleh gerakan atau
putaran.
Ada banyak bagian motor listrik tapi, sejatinya motor listrik hanya memiliki komponen utama yaitu stator dan rotor. Berikut ini bagian-bagian motor listrik:
·
a) Badan Motor, adalah tempat lilitan stator.terdiri dari rumah dengan alur-alurnya yang dibuat dari pelat-pelat yang dipejalkan berikut tutupnya.
b) Kumparan Stator, adalah elektromagnetik berfungsi sebagai penghasil medan magnet bias diganti dengan medan magnet tetap yang memiliki dua kutub magnet yang saling berhadapan, kutub utara dan kutub selatan
·
a) Sikat, untuk menghubungkan arus dari sumber tegangan ke komutator dari kumparan.
b) Komutator, untuk mengubah/membalik arah arus yang mengalir pada kumparan agar putaran motor dapat terjadi. (Tidak bergerak bolak-balik) dan membantu dalam transmisi arus antara rotor dengan sumber daya.
·
·
·
·
Berikut ini gambar bagian-bagian motor listrik:

Gambar 24. Struktur Motor
Pada dasarnya motor listrik dibedakan dari jenis sumber tegangannya motor listrik terbagi 2 yaitu: Motor AC {Alternating Current} atau Motor Listrik Arus Bolak-Balik danMotor DC {Direct Current} atau Motor Listrik Arus Searah. Dari 2 jenis motor listrik tersebut terdapat klasifikasi jenis-jenis motor listrik berdasarkan prinsip kerja, konstruksi, operasi dan karakternya. Seperti yang terlihat gambar dibawah ini:

Gambar 25. Jenis-Jenis Motor
Motor DC adalah jenis motor listrik yang memerlukan sumber tegangan DC untuk beroperasi. Motor DC dibedakan lagi dari sumber dayanya yaitu sebagai berikut:
·
·
- Motor DC Seri. Jenis motor yang gulungan medannya dihubungkan secara seri dengan gulungan kumparan motor,
- Motor DC Shunt. Jenis motor yang gulungan medannya dihubungkan secara pararel dengan gulungan kumparan motor
- Motor DC Campuran/Kompon. Jenis motor yang gulungan medan dihubungkan secara pararel dan seri dengan gulungan motor listri.
Motor AC adalah jenis motor listrik yang memerlukan sumber tegangan AC untuk beroperasi. Motor AC dibedakan lagi dari sumber dayanya yaitu sebagai berikut:
·
·
a) Motor 1 Fasa, motor yang beroperasi dengan daya 1 fasa untuk menghasilkan tenaga mekanik.
b) Motor 3 Fasa, motor yang beroperasi dengan daya 3 fasa untuk menghasilkan tenaga mekanik.
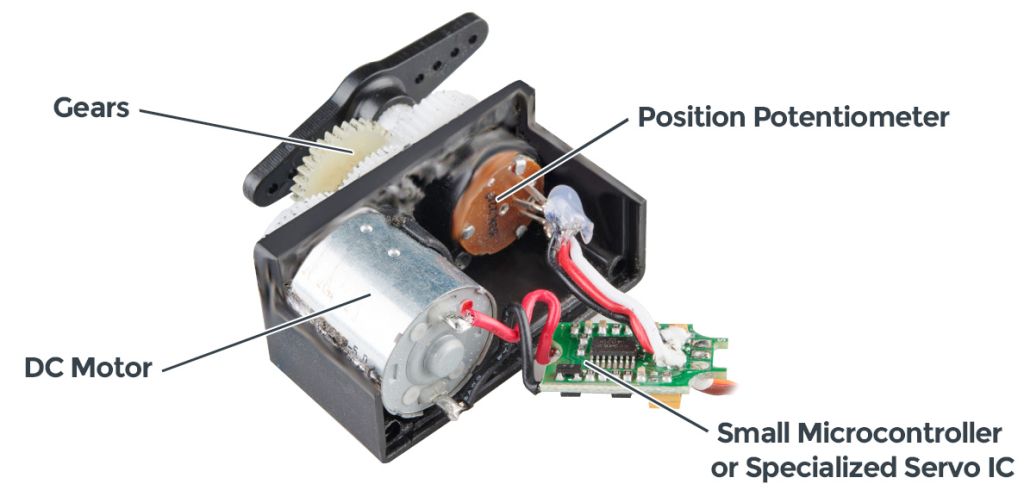
8. Motor PWM-Servo
Motor servo menggunakan dengan
sistem umpan balik
tertutup, di mana posisi dari motor akan diinformasikan kembali ke rangkaian
kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor DC,
serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi
untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu
motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal
dari kabel motor. Karena motor DC servo merupakan alat untuk mengubah energi
listrik menjadi energy mekanik, maka magnit permanent motor DC servolah yang
mengubah energi listrik ke dalam energi mekanik melalui interaksi dari dua
medan magnit. Salah satu medan dihasilkan oleh magnit permanent dan yang
satunya dihasilkan oleh arus yang mengalir dalam kumparan motor. Resultan dari
dua medan magnit tersebut menghasilkan torsi yang membangkitkan putaran motor
tersebut. Saat motor berputar, arus pada kumparan motor menghasilkan torsi yang
nilainya konstan.
Gambar 21. Motor Servo
Spesifikasinya kurang lebih sebagai berikut :
· tegangan kerja : 4,8 – 6 Vdc
· torsi : 1,6 kg/cm
· arus : < 500 mA
· dimensi : 22 x 12,5 x 29,5 cm
· berat : 9 gr
· kecepatan putaran: 0,12 detik/60 derajat
Konfigurasi Pin :
|
Motor Servo
Untuk dapat mengontrol motor servo
kita perlu memberikan pulsa high dan pulsa low dengan lebar tertentu. Frekuensi
yang diperlukan adalah 50 Hz. Pulsa ini dapat dihasilkan dengan port I/O biasa
pada mikrokontroler. Namun terkadang dengan cara ini pergerakan servo menjadi
kurang akurat. Oleh karena itu digunakan metode Pulse Width Modulation (PWM). Dengan metode PWM dapat dihasilkan gerakan servo
yang cukup akurat dengan resolusi yang kita sesuaikan dengan keinginan
kita.
Berikut ini adalah salah satu
contoh pulsa yang dihasilkan untuk menggerakan servo dengan sudut
0o,90o,
dan 180o

Pulsa ini dapat dihasilkan dari pin
OCR pada
mikrokontroler. Perlu pengaturan register timer pada mikrokontroler agar dapat
dihasilkan pulsa dengan lebar yang sesuai kita inginkan. Hal yang sangat
penting adalah pengaturan frekuensi dan lebar pulsa on dan pulsa off. Oleh
karena itu perlu dihitung berapa konstanta-konstanta timer yang di atur pada
mikrokontroler.
Dua parameter utama
yang diperlukan untuk mencari konstanta-konstanta timer adalah nilai clock mikrokontroler
dan nilai clock timer (ditentukan dari prescaler). Dari kedua parameter
itu kita dapat merancang lebar pulsa high dan pulsa low dengan frekuensi
tertentu yang sesuai untuk menggerakan motor servo, seperti pulsa pada gambar
di atas.
9. LCD

Gambar 27.LCD
LCD atau Liquid Crystal Display adalah suatu jenis media display (tampilan) yang menggunakan kristal cair (liquid crystal) untuk menghasilkan gambar yang terlihat. Teknologi Liquid Crystal Display (LCD) atau Penampil Kristal Cair sudah banyak digunakan pada produk-produk seperti layar Laptop, layar Ponsel, layar Kalkulator, layar Jam Digital, layar Multimeter, Monitor Komputer, Televisi, layar Game portabel, layar Thermometer Digital dan produk-produk elektronik lainnya.
Teknologi Display LCD ini memungkinkan produkproduk elektronik dibuat menjadi jauh lebih tipis jika dibanding dengan teknologi Tabung Sinar
Katoda (Cathode Ray Tube atau CRT). Jika dibandingkan dengan teknologi CRT,
LCD juga jauh lebih hemat dalam mengkonsumsi daya karena LCD bekerja berdasarkan prinsip
pemblokiran cahaya sedangkan CRT berdasarkan prinsip pemancaran cahaya. Namun LCD
membutuhkan lampu backlight (cahaya latar belakang) sebagai cahaya pendukung karena LCD
sendiri tidak memancarkan cahaya. Beberapa jenis backlight yang umum digunakan untuk LCD
diantaranya adalah backlight CCFL (Cold cathode fluorescent lamps) dan backlight LED
(Light-emitting diodes).
LCD atau Liquid Crystal Display pada dasarnya terdiri dari
dua bagian utama yaitu bagian Backlight (Lampu Latar Belakang) dan bagian Liquid Crystal
(Kristal Cair). Seperti yang disebutkan sebelumnya, LCD tidak memancarkan pencahayaan
apapun, LCD hanya merefleksikan dan mentransmisikan cahaya yang melewatinya. Oleh karena
itu, LCD memerlukan Backlight atau Cahaya latar belakang untuk sumber cahayanya. Cahaya
Backlight tersebut pada umumnya adalah berwarna putih. Sedangkan Kristal Cair (Liquid
Crystal) sendiri adalah cairan organik yang berada diantara dua lembar kaca yang memiliki
permukaan transparan yang konduktif.
Bagian-bagian LCD atau Liquid Crystal Display diantaranya adalah:
- Lapisan Terpolarisasi 1 (Polarizing Film 1)
- Elektroda Positif (Positive Electrode)
- Lapisan Kristal Cair (Liquid Cristal Layer)
- Elektroda Negatif (Negative Electrode)
- Lapisan Terpolarisasi 2 (Polarizing film 2)
- Backlight atau Cermin (Backlight or Mirror)
Dibawah ini adalah gambar struktur dasar sebuah LCD:

Gambar 28.Struktur LCD
LCD yang digunakan pada Kalkulator dan Jam Tangan digital pada umumnya menggunakan Cermin untuk memantulkan cahaya alami agar dapat menghasilkan digit yang terlihat di layar. Sedangkan LCD yang lebih modern dan berkekuatan tinggi seperti TV, Laptop dan Ponsel Pintar menggunakan lampu Backlight (Lampu Latar Belakang) untuk menerangi piksel kristal cair. Lampu Backlight tersebut pada umumnya berbentuk persegi panjang atau strip lampu Flourescent atau Light Emitting Diode (LED). Cahaya putih adalah cahaya terdiri dari ratusan cahaya warna yang berbeda. Ratusan warna cahaya tersebut akan terlihat apabila cahaya putih mengalami refleksi atau perubahan arah sinar. Artinya, jika beda sudut refleksi maka berbeda pula warna cahaya yang dihasilkan.
Backlight LCD yang berwarna putih akan memberikan pencahayaan pada Kristal Cair atau Liquid Crystal. Kristal cair tersebut akan menyaring backlight yang diterimanya dan merefleksikannya sesuai dengan sudut yang diinginkan sehingga menghasilkan warna yang dibutuhkan. Sudut Kristal Cair akan berubah apabila diberikan tegangan dengan nilai tertentu. Karena dengan perubahan sudut dan penyaringan cahaya backlight pada kristal cair tersebut, cahaya backlight yang sebelumnya adalah berwarna putih dapat berubah menjadi berbagai warna.
Jika ingin menghasilkan warna putih, maka kristal cair akan dibuka selebar-lebarnya sehingga cahaya backlight yang berwarna putih dapat ditampilkan sepenuhnya. Sebaliknya, apabila ingin menampilkan warna hitam, maka kristal cair harus ditutup serapat-rapatnya sehingga tidak adalah cahaya backlight yang dapat menembus. Dan apabila menginginkan warna lainnya, maka diperlukan pengaturan sudut refleksi kristal cair yang bersangkutan.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








10. Potensiometer

Gambar 29.Potensiometer
Potensiometer adalah salah satu jenis Resistor
yang Nilai Resistansinya dapat diatur sesuai dengan kebutuhan Rangkaian Elektronika ataupun
kebutuhan pemakainya. Potensiometer merupakan Keluarga Resistor yang tergolong dalam
Kategori Variable Resistor. Secara struktur, Potensiometer terdiri dari 3 kaki Terminal dengan
sebuah shaft atau tuas yang berfungsi sebagai pengaturnya. Gambar dibawah ini menunjukan
Struktur Internal Potensiometer beserta bentuk dan Simbolnya.
Pada dasarnya bagianbagian penting dalam Komponen Potensiometer adalah:
· Pen yapu atau disebut juga dengan Wiper
· Ele ment Resistif
· Ter minal
Berdasarkan bentuknya, Potensiometer dapat dibagi menjadi 3 macam, yaitu:
1. Potensiometer Slider, yaitu Potensiometer yang nilai resistansinya dapat diatur dengan cara menggeserkan Wiper-nya dari kiri ke kanan atau dari bawah ke atas sesuai dengan pemasangannya. Biasanya menggunakan Ibu Jari untuk menggeser wiper-nya.
2. Potensiometer Rotary, yaitu Potensiometer yang nilai resistansinya dapat diatur dengan cara memutarkan Wiper-nya sepanjang lintasan yang melingkar. Biasanya menggunakan Ibu Jari untuk memutar wiper tersebut. Oleh karena itu, Potensiometer Rotary sering disebut juga dengan Thumbwheel Potentiometer.
3. Potensiometer Trimmer, yaitu Potensiometer yang bentuknya kecil dan harus menggunakan alat khusus seperti Obeng (screwdriver) untuk memutarnya. Potensiometer Trimmer ini biasanya dipasangkan di PCB dan jarang dilakukan pengaturannya.

Gambar 30. Jenis-Jenis Potensometer
Sebuah Potensiometer (POT) terdiri dari sebuah elemen resistif yang membentuk jalur (track) dengan terminal di kedua ujungnya. Sedangkan terminal lainnya (biasanya berada di tengah) adalah Penyapu (Wiper) yang dipergunakan untuk menentukan pergerakan pada jalur elemen resistif (Resistive). Pergerakan Penyapu (Wiper) pada Jalur Elemen Resistif inilah yang mengatur naik-turunnya Nilai Resistansi sebuah Potensiometer.
Elemen Resistif pada Potensiometer umumnya terbuat dari bahan campuran Metal (logam) dan Keramik ataupun Bahan Karbon (Carbon). Berdasarkan Track (jalur) elemen resistif-nya, Potensiometer dapat digolongkan menjadi 2 jenis yaitu Potensiometer Linear (Linear Potentiometer) dan Potensiometer Logaritmik (Logarithmic Potentiometer).
Dengan kemampuan yang dapat mengubah resistansi atau hambatan, Potensiometer sering digunakan dalam rangkaian atau peralatan Elektronika dengan fungsi-fungsi sebagai berikut:
·
·
·
·
·
·
11. Buzzer

Buzzer Elektronika adalah sebuah komponen elektronika yang dapat menghasilkan getaran suara berupa gelombang bunyi. Buzzer elektronika akan menghasilkan getaran suara ketika diberikan sejumlah tegangan listrik dengan taraf tertentu sesuai dengan spesifikasi bentuk dan ukuran buzzer elektronika itu sendiri. Pada umumnya, buzzer elektronika ini sering digunakan sebagai alarm karena penggunaannya yang cukup mudah yaitu dengan memberikan tegangan input maka buzzer elektronika akan menghasilkan getaran suara berupa gelombang bunyi yang dapat didengar manusia.
Pada dasarnya Buzzer Elektronika menyerupai loud speaker namun memiliki fungsi-fungsi yang lebih sederhana. Berikut adalah beberapa fungsi buzzer elektronika :
- Sebagai bel rumah
- Alarm pada berbagai peralatan
- Peringatan mundur pada truk
- Komponen rangkaian anti maling
- Indikator suara sebagai tanda bahaya atau yang lainnya
- Timer
- Dan lain-lain
Pada dasarnya, prinsip kerja dari buzzer elektronika hampir sama dengan loud speaker dimana buzzer juga terdiri dari kumparan yang terpasang secara diafragma. Ketika kumparan tersebut dialiri listrik maka akan menjadi elektromagnet sehingga mengakibatkan kumparan tertarik ke dalam ataupun ke luar tergantung dari arah arus dan polaritas magnetnya. Karena kumparan dipasang secara diafragma maka setiap kumparan akan menggerakkan diafragma tersebut secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara.
Konfigurasi pin :
- kaki pendek/negatif dihubungkan ke GND
- kaki panjang/positif dihunbungkan ke pin 13
Spesifikasi:
1. Tegangan operasi 4-8V DC
2. Arus <30mA
3. Frekuensi Resonansi 2300Hz
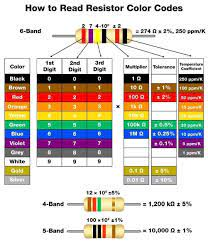
12. Resistor



1. Resistor 4 gelang warna
Maka cincin ke 1 dan ke 2 merupakan digit angka, dan cincin kode warna ke 3 merupakan faktor pengali kemudian cincin kode warnake 4 menunjukan nilai toleransi resistor.
2. Resistor 5 gelang warna
Maka cincin ke 1, ke 2 dan ke 3 merupakan digit angka, dan cincin kode warna ke 4 merupakan faktor pengali kemudian cincin kode warna ke 5 menunjukan nilai toleransi resistor.
3. Resistor 6 gelang warna
Resistor dengan 6 cicin warna pada prinsipnya sama dengan resistor dengan 5 cincin warna dalam menentukan nilai resistansinya. Cincin ke 6 menentukan coefisien temperatur yaitu temperatur maksimum yang diijinkan untuk resistor tersebut.
Toleransi resistor merupakan perubahan nilai resistansi dari nilai yang tercantum pada badan resistor yang masih diperbolehkan dan dinyatakan resistor dalam kondisi baik. Toleransi resistor merupakan salah satu perubahan karakteristik resistor yang terjadi akibat operasional resistor tersebut. Nilai toleransi resistor ini ada beberapa macam yaitu resistor dengan toleransi kerusakan 1% (resistor 1%), resistor dengan toleransi kesalahan 2% (resistor2%), resistor dengan toleransi kesalahan 5% (resistor 5%) dan resistor dengan toleransi 10% (resistor 10%).
Perhitungan:


Pada transistor PNP, semikonduktor tipe-N diapit oleh dua semikonduktor tipe-P. Transistor PNP juga dapat dibentuk dengan menghubungkan katoda dari dua dioda sebagai base dan anoda sebagai kolektor dan emitor. Hubungan emitter-base foward bias sementara collector-base reverse bias. Jadi, arus mengalir dari emitor ke kolektor karena potensial emitor lebih besar daripada base dan kolektor.
Pada transistor NPN, semikonduktor tipe-P diapit oleh dua semikonduktor tipe-N. Transistor NPN juga dapat dibentuk dengan menghubungkan anoda dari dua dioda sebagai base dan katoda sebagai kolektor dan emitor. Arus mengalir dari kolektor ke emitor karena potensial kolektor lebih besar daripada base dan emitor.

Transistor sebagai saklar
Jika ada arus yang cukup besar di kaki basis, transistor akan mencapai titk jenuh (saturasi). Pada titk jenuh ini transistor mengalirkan arus secara maksimum dari kolektor ke emitor sehingga transistor seolah-olah short pada hubungan kolektor-emitor. Jika arus base sangat kecil maka kolektor dan emitor bagaikan saklar yang terbuka. Pada kondisi ini transistor dalam keadaan cut-off sehingga tidak ada arus dari kolektor ke emitor. Nilai resistor terhubung ke base (Rb) dapat dihitung dengan;
Rb = Vbe / Ib
Transistor sebagai penguat
Transistor sebagai penguat jika bekerja dalam daerah aktif. Tegangan, arus, dan daya dapat diperkuat dengan beberapa konfigurasi seperti common emitter, common colector, dan common base.

4. Percobaan [KEMBALI]








2.
Rangkaian
Simulasi -Disini
3. Listing
Program Master - Disini
4. Listing Program Slave1 - Disini
5. Listing Program Slave2 - Disini
5. Listing DHT Sensor - Disini
6. Datasheet LDR Sensor - Disi ni
7. Datasheet LM35 Sensor - Disini
8. Datasheet PIR Sensor - Disini
9. Datasheet PWM-Servo - Disini
10. Datasheet Arduino Uno - Disini
11. Datasheet Arduino Nano - Disini
Tidak ada komentar:
Posting Komentar