Aplikasi Pengukur Percepatan Kendaraan
DAFTAR ISI
1. Aplikasi Pengukur Percepatan Kendaraan Dengan Sensor Accelerometer
1. Aplikasi Pengukur Percepatan Kendaraan Dengan Sensor Accelerometer [kembali] Untuk mengetahui bagaimana prinsip kerja rangkaian sensor accelerometer dengan mengaplikasikan vibration sensor dan menggunakan op amp.
Alat :
1. Timer
Gambar 2.6 Timer
Untuk menghitung waktu
2. Probe Voltage
Berfungsi untuk mendeteksi apakah pada sumber yang di uji terdapat tegangan atau tidak. Bisa menguji tegangan AC serta tegangan DC.
3. Ground
Sistem grounding pada peralatan kelistrikan dan elektronika adalah untuk memberikan perlindungan pada seluruh sistem. Untuk lebih jelasnya, berikut ini adalah beberapa fungsi dari grounding:
Untuk keselamatan, grounding berfungsi sebagai penghantar arus listrik langsung ke bumi atau tanah saat terjadi kebocoran isolasi atau percikan api pada konsleting, misalnya kabel grounding yang terpasang pada badan/sasis alat elektronik seperti setrika listrik akan mencegah kita tersengat listrik saat rangkaian di dalam setrika bocor dan menempel ke badan setrika.
Dalam instalasi penangkal petir, system grounding berfungsi sebagai penghantar arus listrik yang besar langsung ke bumi. meski sifatnya sama, namun pemasangan kabel grounding untuk instalasi rumah dan grounding untuk pernangkal petir pemasangannya harus terpisah.
Sebagai proteksi peralatan elektronik atau instrumentasi sehingga dapat mencegah kerusakan akibat adanya bocor tegangan.
Grounding di dunia eletronika berfungsi untuk menetralisir cacat (noise) yang disebabkan baik oleh daya yang kurang baik, ataupun kualitas komponen yang tidak standar
Bahan :
1. Resistor
Resistor merupakan komponen elektronik yang memiliki dua pin dan didesain untuk mengatur tegangan listrik dan arus listrik. Resistor mempunyai nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di antara kedua pin dimana nilai tegangan terhadap resistansi tersebut berbanding lurus dengan arus yang mengalir,
berdasarkan persamaan hukum Ohm:
V = I R
Resistor digunakan sebagai bagian dari rangkaian elektronik dan sirkuit elektronik, dan merupakan salah satu komponen yang paling sering digunakan. Resistor dapat dibuat dari bermacam-macam komponen dan film, bahkan kawat resistansi (kawat yang dibuat dari paduan resistivitas tinggi seperti nikel-kromium).
Karakteristik utama dari resistor adalah resistansinya dan daya listrik yang dapat dihantarkan. Karakteristik lain termasuk koefisien suhu, derau listrik (noise), dan induktansi.
resistor
Cara membaca resistor
Spesifikasi :
2. Op Amp non inverting
Gambar 2.4 Op Amp non inverting
Penguat Non Inverting adalah suatu rangkaian penguat yang berfungsi menguatkaan sinyal dan hasil sinyal yang dikuatkan tetap sefasa dengan sinyal inputannya, hasil dari sinyal input dan output rangkaian non inverting dapat dilihat pada Gambar 1. Pada dasarnya penguat non inverting digunakan sebagai pengkondisi sinyal inputan sensor yang terlalu kecil sehingga dibutuhkan penguatan untuk diproses. intinya penguat non inverting ke balikkan dari penguat inverting.
Fungsi dari penguat non inverting kurang lebih sama dengan penguat inverting hanya saja polaritas output yang dihasilkan sama dengan sinyal inputnya. Keluaran sensor dan tranduser pada umumnya mempunyai tegangan yang sangat kecil hingga mikro volt, sehingga diperlukan penguat dengan impedansi masukan rendah. Rangkaian penguat non inverting akan menerima arus atau tegangan dari tranduser sangat kecil dan akan membangkitkan arus atau tegangan yang lebih besar
4. Logicstate

state logika. Logika pengertian, benar atau salah, dari sinyal biner yang diberikan Sinyal biner adalah sinyal digital yang hanya memiliki dua nilai valid. Secara fisik pengertian logis dari sinyal biner ditentukan oleh level tegangan atau nilai arus sinyal, dan ini pada gilirannya ditentukan oleh teknologi perangkat. Dalam sirkuit TTL, misalnya, keadaan sebenarnya diwakili oleh logika 1, kira-kira sama dengan +5 volt pada saluran sinyal; Logika 0 kira-kira 0 volt. Level tegangan antara 0 dan +5 volt dianggap tidak terdefinisi.
Komponen Input:
1. Sensor Infrared
Sensor Infrared
Gambar 3.1. Infrared
Infra red (IR) detektor atau sensor infra merah adalah komponen elektronika yang dapat mengidentifikasi cahaya infra merah (infra red, IR). Sensor infra merah atau detektor infra merah saat ini ada yang dibuat khusus dalam satu modul dan dinamakan sebagai IR Detector Photomodules. IR Detector Photomodules merupakan sebuah chip detektor inframerah digital yang di dalamnya terdapat fotodiode dan penguat (amplifier).
2.Sensor Vibration
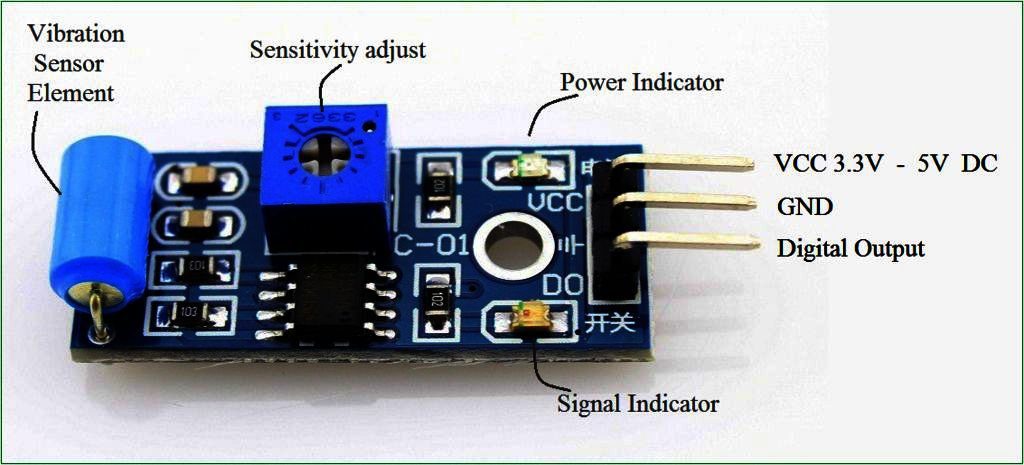
Gambar 3.3 Sensor Vibration
Sensor getaran adalah suatu perangkat atau device yang mengubah besaran fisis berupa getaran menjadi besaran elektrik yang bisa berupa tegangan maupun arus. Pada umumnya getaran ini diubah menjadi arus karena pertimbangan bahwa jarak antara sensor dengan kontroler tidaklah sangat dekat, ada kemungkinan jaraknya jauh. Bila getaran tersebut diubah menjadi arus, maka arus yang dihasilkan sensor dengan arus yang diterima kontroler akan sama besarnya. Hal ini tentunya akan berbeda jika getaran diubah menjadi tegangan.Tegangan yang dihasilkan sensor akan tidak sama dengan tegangan yang diterima kontroler sebagai akibat dari adanya losses.
Spesifikasi modul:
Menggunakan sensor SW-420 normally closed
Sinyal output comparator bersih, bergelombang bagus dan mampu menghantar lebih dari 15mA
Tegangan kerja 3.3V - 5V
Format output: 0 dan 1 (digital, rendah dan tinggi)
Dilengkapi lubang baut untuk instalasi
Papan PCB kecil berukuran 3.2cm x 1.4cm
Memakai comparator LM393
Pin Configuration of Vibration Sensor Module
Pin Name | Description |
VCC | The Vcc pin powers the module, typically with +5V |
GND | Power Supply Ground |
DO | Digital Out Pin for Digital Output. |
Vibration Sensor Module Features & Specifications
- Operating Voltage: 3.3V to 5V DC
- Operating Current: 15mA
- Using SW-420 normally closed type vibration sensor
- LEDs indicating output and power
- LM393 based design
- Easy to use with Microcontrollers or even with normal Digital/Analog IC
- With bolt holes for easy installation
- Small, cheap and easily available
3. Motor DC
Motor Listrik DC atau DC Motor adalah suatu perangkat yang mengubah energi listrik menjadi energi kinetik atau gerakan (motion). Motor DC ini juga dapat disebut sebagai Motor Arus Searah. Seperti namanya, DC Motor memiliki dua terminal dan memerlukan tegangan arus searah atau DC (Direct Current) untuk dapat menggerakannya. Motor Listrik DC ini biasanya digunakan pada perangkat-perangkat Elektronik dan listrik yang menggunakan sumber listrik DC seperti Vibrator Ponsel, Kipas DC dan Bor Listrik DC.
Motor Listrik DC atau DC Motor ini menghasilkan sejumlah putaran per menit atau biasanya dikenal dengan istilah RPM (Revolutions per minute) dan dapat dibuat berputar searah jarum jam maupun berlawanan arah jarum jam apabila polaritas listrik yang diberikan pada Motor DC tersebut dibalikan. Motor Listrik DC tersedia dalam berbagai ukuran rpm dan bentuk. Kebanyakan Motor Listrik DC memberikan kecepatan rotasi sekitar 3000 rpm hingga 8000 rpm dengan tegangan operasional dari 1,5V hingga 24V. Apabile tegangan yang diberikan ke Motor Listrik DC lebih rendah dari tegangan operasionalnya maka akan dapat memperlambat rotasi motor DC tersebut sedangkan tegangan yang lebih tinggi dari tegangan operasional akan membuat rotasi motor DC menjadi lebih cepat. Namun ketika tegangan yang diberikan ke Motor DC tersebut turun menjadi dibawah 50% dari tegangan operasional yang ditentukan maka Motor DC tersebut tidak dapat berputar atau terhenti. Sebaliknya, jika tegangan yang diberikan ke Motor DC tersebut lebih tinggi sekitar 30% dari tegangan operasional yang ditentukan, maka motor DC tersebut akan menjadi sangat panas dan akhirnya akan menjadi rusak.

Spesifikasi:
1.3. Dasar Teori [kembali]
Accelerometer adalah sebuah sensor tranduser yang berfungsi untuk mendeteksi, mengukur perubahan percepatan, orientasi object, dan mengukur getaran, atau bisa juga untuk mengukur percepatan akibat pengaruh gaya gravitasi.
Sebuah accelerometer juga dapat digunakan untuk mengukur getaran yang terjadi pada kendaraan, bangunan, mesin, jarak yang dinamis, dan kecepatan dengan ataupun tanpa pengaruh dari gaya gravitasi.
Prinsip kerja dari accelerometer ini berdasarkan prinsip Fisika bahwa apabila suatu konduktor digerakkan melalui suatu medan magnet, atau jika suatu medan magnet digerakkan melalui suatu konduktor, maka akan timbul suatu tegangan induksi pada konduktor tersebut.
Sebuah accelerometer yang diletakan di permukaan Bumi dapat mendeteksi percepatan 1g (ukuran percepatan gravitasi Bumi) pada titik vertikalnya, untuk percepatan yang dikarenakan oleh pergerakan horizontal maka accelerometer akan mengukur percepatannya secara langsung ketika bergerak secara horizontal.
1 Sensor Inframerah
Gambar 3.1 Sensor Inframerah
Sistem sensor infra merah pada dasarnya menggunakan infra merah sebagai media untuk komunikasi data antara receiver dan transmitter. Sistem akan bekerja jika sinar infra merah yang dipancarkan terhalang oleh suatu benda yang mengakibatkan sinar infra merah tersebut tidak dapat terdeteksi oleh penerima. Keuntungan atau manfaat dari sistem ini dalam penerapannya antara lain sebagai pengendali jarak jauh, alarm keamanan, otomatisasi pada sistem. Pemancar pada sistem ini tediri atas sebuah LED infra merah yang dilengkapi dengan rangkaian yang mampu membangkitkan data untuk dikirimkan melalui sinar infra merah, sedangkan pada bagian penerima biasanya terdapat foto transistor, fotodioda, atau inframerah modul yang berfungsi untuk menerima sinar inframerah yang dikirimkan oleh pemancar.
Gambar 2.2 Prinsip kerja Infrared
Infra red (IR) detektor atau sensor infra merah adalah komponen elektronika yang dapat mengidentifikasi cahaya infra merah (infra red, IR). Sensor infra merah atau detektor infra merah saat ini ada yang dibuat khusus dalam satu modul dan dinamakan sebagai IR Detector Photomodules. IR Detector Photomodules merupakan sebuah chip detektor inframerah digital yang di dalamnya terdapat fotodiode dan penguat (amplifier).
Konfigurasi pin infra red (IR) receiver atau penerima infra merah tipe TSOP adalah output (Out), Vs (VCC +5 volt DC), dan Ground (GND). Sensor penerima inframerah TSOP ( TEMIC Semiconductors Optoelectronics Photomodules ) memiliki fitur-fitur utama yaitu fotodiode dan penguat dalam satu chip, keluaran aktif rendah, konsumsi daya rendah, dan mendukung logika TTL dan CMOS. Detektor infra merah atau sensor inframerah jenis TSOP (TEMIC Semiconductors Optoelectronics Photomodules) adalah penerima inframerah yang telah dilengkapi filter frekuensi 30-56 kHz, sehingga penerima langsung mengubah frekuensi tersebut menjadi logika 0 dan 1. Jika detektor inframerah (TSOP) menerima frekuensi carrier tersebut, maka pin keluarannya akan berlogika 0. Sebaliknya, jika tidak menerima frekuensi carrier tersebut, maka keluaran detektor inframerah (TSOP) akan berlogika 1.
Prinsip kerja rangkaian sensor infrared berdasarkan pada gambar 2. Adalah ketika cahaya infra merah diterima oleh fototransistor maka basis fototransistor akan mengubah energi cahaya infra merah menjadi arus listrik sehingga basis akan berubah seperti saklar (swith closed) atau fototransistor akan aktif (low) secara sesaat seperti gambar 3:
2. Sensor Vibration
Gambar 3.3 Sensor Vibration
Sensor getaran adalah suatu perangkat atau device yang mengubah besaran fisis berupa getaran menjadi besaran elektrik yang bisa berupa tegangan maupun arus. Pada umumnya getaran ini diubah menjadi arus karena pertimbangan bahwa jarak antara sensor dengan kontroler tidaklah sangat dekat, ada kemungkinan jaraknya jauh. Bila getaran tersebut diubah menjadi arus, maka arus yang dihasilkan sensor dengan arus yang diterima kontroler akan sama besarnya. Hal ini tentunya akan berbeda jika getaran diubah menjadi tegangan.Tegangan yang dihasilkan sensor akan tidak sama dengan tegangan yang diterima kontroler sebagai akibat dari adanya losses.
Sensor getaran mempunyai peranan yang sangat penting dalam berbagai penerapan, seperti alat untuk pendeteksi gempa bumi, analisa kerja mesin, analisa struktur bangunan gedung bertingkat, pengeboran tambang minyak, analisa kekuatan getaran jembatan, dan lain sebagainya yang tentunya segala penerapan yang berhubungan dengan getaran.
Macam-macam sensor getar adalah sensor geophone, piezoelectrik, akselerometer, sensor UGN 3503 dan lain sebagiannya.
Transistor NPN, arus akan mengalir dari kolektor ke emitor jika basisnya dihubungkan ke ground (negatif). Arus yang mengalir dari basis harus lebih kecil daripada arus yang mengalir dari kolektor ke emitor, oleh sebab itu maka ada baiknya jika pada pin basis dipasang sebuah resistor.
Relay merupakan komponen elektronika berupa saklar atau switch elektrik yang dioperasikan secara listrik dan terdiri dari 2 bagian utama yaitu Elektromagnet (coil) dan mekanikal (seperangkat kontak Saklar/Switch). Komponen elektronika ini menggunakan prinsip elektromagnetik untuk menggerakan saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Berikut adalah simbol dari komponen relay.
Grafik Kecepatan terhadap Waktu
Bentuk grafik hubungan antara kecepatan dan waktu adalah seperti persamaan garis lurus. Grafik tersebut memiliki kemiringan (gradien) tertentu. Coba sobat amati grafik di atas. Grafik hubungan V dan t jika kecepatan awal(Vo) adalah nol ditunjukkan oleh grafik a dan jika kecepatannya adalah Vo maka grafiknya seperti tampak pada grafik b.
Gambar 3.4 Grafik Kecepatan
Dari grafik di atas bisa sobat amati adanya kemiringan (gradien garis). Pada prinsipnya rumus kecepatan pada GLBB Vt = Vo + at sama seperti rumus pada persamaan garis lurus y = mx + c. Vt dianalogikan dengan y, c dianalogikan dengan kecepatan awal Vo, dan mx dianalogikan dengan at. Besarnya percepatan a akan sama dengan kemiringan garis (gradien). Rumusnya
a = tan θ
Jadi, pada gerak lurus berubah beraturan kemiringan grafik hubungan v dengan t adalah sama dengan percepatan yang terjadi pada gerak tersebut. Semakin curam grafik tersebut maka semakin besar percepatannya. Dengan melihat ilustrasi di bawah ini sobat bisa tahu bahwa grafik a yang lebih curam punya percepatan yang lebih besar dari grafik b yang bentuknya lebih landai punya percepatan yang lebih kecil.

Gambar 3.5 Grafik Kecepatan per waktu
3. Resistor
Resistor adalah komponen elektronika yang berfungsi untuk menghambat atau membatasi aliran listrik yang mengalir dalam suatu rangkain elektronika. Resistor bersifat resistif dan termasuk salah satu komponen elektronika dalam kategori komponen pasif. Satuan atau nilai resistansi suatu resistor di sebut Ohm dan dilambangkan dengan simbol Omega (Ω). Sesuai hukum Ohm bahwa resistansi berbanding terbalik dengan jumlah arus yang mengalir melaluinya. Selain nilai resistansinya (Ohm) resistor juga memiliki nilai yang lain seperti nilai toleransi dan kapasitas daya yang mampu dilewatkannya.
Resistor merupakan salah satu komponen elektronika pasif yang berfungsi untuk membatasi arus yang mengalir pada suatu rangkaian dan berfungsi sebagai teminal antara dua komponen elektronika. Tegangan pada suatu resistor sebanding dengan arus yang melewatinya (V = I.R). Umumnya terdapat 4 Gelang di tubuh Resistor, tetapi ada juga yang 5 Gelang.
Gelang warna Emas dan Perak biasanya terletak agak jauh dari gelang warna lainnya sebagai tanda gelang terakhir. Gelang Terakhirnya ini juga merupakan nilai toleransi pada nilai Resistor yang bersangkutan.
Cicin warna yang terdapat pada resistor terdiri dari 4 ring 5 dan 6 ring warna. Dari cicin warna yang terdapat dari suatu resistor tersebut memiliki arti dan nilai dimana nilai resistansi resistor dengan kode warna yaitu :
1. Resistor 4 gelang warna
Maka cincin ke 1 dan ke 2 merupakan digit angka, dan cincin kode warna ke 3 merupakan faktor pengali kemudian cincin kode warnake 4 menunjukan nilai toleransi resistor.
2. Resistor 5 gelang warna
Maka cincin ke 1, ke 2 dan ke 3 merupakan digit angka, dan cincin kode warna ke 4 merupakan faktor pengali kemudian cincin kode warna ke 5 menunjukan nilai toleransi resistor.
3. Resistor 6 gelang warna
Resistor dengan 6 cicin warna pada prinsipnya sama dengan resistor dengan 5 cincin warna dalam menentukan nilai resistansinya. Cincin ke 6 menentukan coefisien temperatur yaitu temperatur maksimum yang diijinkan untuk resistor tersebut.
Toleransi resistor merupakan perubahan nilai resistansi dari nilai yang tercantum pada badan resistor yang masih diperbolehkan dan dinyatakan resistor dalam kondisi baik. Toleransi resistor merupakan salah satu perubahan karakteristik resistor yang terjadi akibat operasional resistor tersebut. Nilai toleransi resistor ini ada beberapa macam yaitu resistor dengan toleransi kerusakan 1% (resistor 1%), resistor dengan toleransi kesalahan 2% (resistor2%), resistor dengan toleransi kesalahan 5% (resistor 5%) dan resistor dengan toleransi 10% (resistor 10%).
4. Motor DC
Motor Listrik DC atau DC Motor adalah suatu perangkat yang mengubah energi listrik menjadi energi kinetik atau gerakan (motion). Motor DC ini juga dapat disebut sebagai Motor Arus Searah. Seperti namanya, DC Motor memiliki dua terminal dan memerlukan tegangan arus searah atau DC (Direct Current) untuk dapat menggerakannya. Motor Listrik DC ini biasanya digunakan pada perangkat-perangkat Elektronik dan listrik yang menggunakan sumber listrik DC seperti Vibrator Ponsel, Kipas DC dan Bor Listrik DC.
Motor Listrik DC atau DC Motor ini menghasilkan sejumlah putaran per menit atau biasanya dikenal dengan istilah RPM (Revolutions per minute) dan dapat dibuat berputar searah jarum jam maupun berlawanan arah jarum jam apabila polaritas listrik yang diberikan pada Motor DC tersebut dibalikan. Motor Listrik DC tersedia dalam berbagai ukuran rpm dan bentuk. Kebanyakan Motor Listrik DC memberikan kecepatan rotasi sekitar 3000 rpm hingga 8000 rpm dengan tegangan operasional dari 1,5V hingga 24V. Apabile tegangan yang diberikan ke Motor Listrik DC lebih rendah dari tegangan operasionalnya maka akan dapat memperlambat rotasi motor DC tersebut sedangkan tegangan yang lebih tinggi dari tegangan operasional akan membuat rotasi motor DC menjadi lebih cepat. Namun ketika tegangan yang diberikan ke Motor DC tersebut turun menjadi dibawah 50% dari tegangan operasional yang ditentukan maka Motor DC tersebut tidak dapat berputar atau terhenti. Sebaliknya, jika tegangan yang diberikan ke Motor DC tersebut lebih tinggi sekitar 30% dari tegangan operasional yang ditentukan, maka motor DC tersebut akan menjadi sangat panas dan akhirnya akan menjadi rusak.
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti.
Hubungan antara kecepatan, flux medan dan tegangan kumparan motor DC ditunjukkan dalam persamaan berikut :
Gaya elektromagnetik : E = K Φ N
Torque : T = K Φ Ia
Dimana:
E =gaya elektromagnetik yang dikembangkan pada terminal kumparan
motor DC (volt)
Φ = flux medan yang berbanding lurus dengan arus medan.
N = kecepatan dalam RPM (putaran per menit)
T = torque electromagnetik
Ia = arus kumparan motor DC
K = konstanta persamaan
5. Op Amp Non Inverting
Penguat Non Inverting adalah suatu rangkaian penguat yang berfungsi menguatkaan sinyal dan hasil sinyal yang dikuatkan tetap sefasa dengan sinyal inputannya, hasil dari sinyal input dan output rangkaian non inverting dapat dilihat pada Gambar 1. Pada dasarnya penguat non inverting digunakan sebagai pengkondisi sinyal inputan sensor yang terlalu kecil sehingga dibutuhkan penguatan untuk diproses. intinya penguat non inverting ke balikkan dari penguat inverting.
Fungsi Penguat Non Inverting
Fungsi dari penguat non inverting kurang lebih sama dengan penguat inverting hanya saja polaritas output yang dihasilkan sama dengan sinyal inputnya. Keluaran sensor dan tranduser pada umumnya mempunyai tegangan yang sangat kecil hingga mikro volt, sehingga diperlukan penguat dengan impedansi masukan rendah. Rangkaian penguat non inverting akan menerima arus atau tegangan dari tranduser sangat kecil dan akan membangkitkan arus atau tegangan yang lebih besar
Analisis Penguatan Op Amp Non Inverting
Dalam menganalisis rangkaian Op-Amp sebagai penguat terdapat dua aturan penting yang perlu diperhatikan. Kedua aturan tersebut menggunakan karakteristik Op-Amp ideal. Aturan ini dalam beberapa literatur dinamakan golden rule, yang berisi :
1. Perbedaan tegangan antara kedua masukan Op-Amp adalah nol (V+ - V- = 0 atau V+ = V-), hal ini bertujuan menghindari adanya tegangan offset. Aturan pertama ini sering disebut dengan virtual ground.
2. Arus yang mengalir pada kedua masukan Op-Amp adalah nol (I+ = I- = 0), hal ini dikarenakan impedansi input pada Op-Amp sangat besar ( Zin = ∞). Dengan memahami kedua aturan tersebut, analisis dari rangkaian Op-Amp akan menjadi lebih mudah.
Untuk memulai analisis rangkaian penguat non-inverting, terapkan hukum Kirchoff arus pada titik cabang A dan asumsi I+ = I- = 0, sehingga gambar rangkaian penguat non-inverting menjadi seperti Gambar 3.
Gambar 3 Penjabaran Rangkaian Penguat Non Inverting untuk mempermudah penurunan rumus
1) Buka aplikasi proteus
2) Pilih komponen yang dibutuhkan, pada rangkaian ini dibutukan komponen led, Infrared, sensor vibration, op amp, logicstate, motor dc.
3) Rangkai setiap komponen menjadi rangkaian yang diinginkan
4) Ubah spesifikasi komponen sesuai kebutuhan
5) Jalankan simulasi rangkaian.
2. Rangkaian dan Prinsip Kerja [kembali]
2.1 Rangkaian Simulasi Sensor
MPXA6115A6U[kembali]

Prinsip Kerja :
Pengukur percepatan dengan sensor inframerah
Kondisi saat inframerah dan vibration tidak mendeteksi atau berlogika 0
Gambar 4.1
Kondisi saat inframerah mendeteksi atau berlogika 1 dan vibration tidak mendeteksi atau berlogika 0
Gambar 4.2
Kondisi saat inframerah dan vibration mendeteksi atau berlogika 1
Gambar 4.3
Prinsip Kerja
Pada saat mobil melewati pengukur percepatan sensor inframerah akan mendeteksi adanya hambatan atau terhalang oleh suatu benda, pada kondisi ini akan memberikan logika '1'. Oleh karenanya mengeluarkan tegangan 5V sehingga arus mengalir masuk ke dalam kaki inverting op amp, tegangan akan diperkuat 10 kali, lalu arus akan menuju ke pengukur kecepatan(Motor DC) dan timer(LED) sehingga motor dan timer akan hidup.
Ketika Mobil melewati vibration prinsipnya sama dengan bagaimana inframerah bekerja, namun mengalirkan arus yang berlawanan kepada pengukur kecepatan (motor DC) dan Timer yang menyebabkan aliran arus menjadi 0 sehingga pengukur kecepatan dan timer akan mati.
Kecepatan dan waktu yang tercatat terakhir kalinya akan dibuatkan grafik seperti yang dijelaskan pada teori di atas, lalu bisa diketahui percepatan dengan rumus a = tan θ, θ merupakan sudut yang terbentuk akibat grafik hubungan kecepatan dengan waktu.
[menuju awal]























 Gambar 3.4 Grafik KecepatanDari grafik di atas bisa sobat amati adanya kemiringan (gradien garis). Pada prinsipnya rumus kecepatan pada GLBB Vt = Vo + at sama seperti rumus pada persamaan garis lurus y = mx + c. Vt dianalogikan dengan y, c dianalogikan dengan kecepatan awal Vo, dan mx dianalogikan dengan at. Besarnya percepatan a akan sama dengan kemiringan garis (gradien). Rumusnyaa = tan θJadi, pada gerak lurus berubah beraturan kemiringan grafik hubungan v dengan t adalah sama dengan percepatan yang terjadi pada gerak tersebut. Semakin curam grafik tersebut maka semakin besar percepatannya. Dengan melihat ilustrasi di bawah ini sobat bisa tahu bahwa grafik a yang lebih curam punya percepatan yang lebih besar dari grafik b yang bentuknya lebih landai punya percepatan yang lebih kecil.
Gambar 3.4 Grafik KecepatanDari grafik di atas bisa sobat amati adanya kemiringan (gradien garis). Pada prinsipnya rumus kecepatan pada GLBB Vt = Vo + at sama seperti rumus pada persamaan garis lurus y = mx + c. Vt dianalogikan dengan y, c dianalogikan dengan kecepatan awal Vo, dan mx dianalogikan dengan at. Besarnya percepatan a akan sama dengan kemiringan garis (gradien). Rumusnyaa = tan θJadi, pada gerak lurus berubah beraturan kemiringan grafik hubungan v dengan t adalah sama dengan percepatan yang terjadi pada gerak tersebut. Semakin curam grafik tersebut maka semakin besar percepatannya. Dengan melihat ilustrasi di bawah ini sobat bisa tahu bahwa grafik a yang lebih curam punya percepatan yang lebih besar dari grafik b yang bentuknya lebih landai punya percepatan yang lebih kecil.








Tidak ada komentar:
Posting Komentar